我国学者在无漂移柔性压力传感器研究方面取得进展
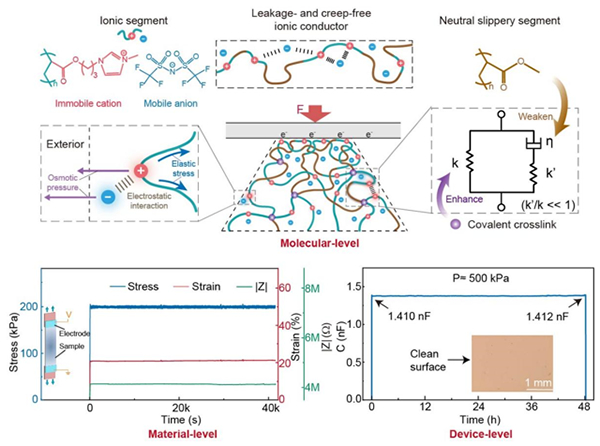
图 无漂移柔性压力传感器的原理、材料和器件性能
在国家自然科学基金项目(批准号:T2225017)等资助下,南方科技大学郭传飞教授团队和杨灿辉助理教授团队合作开发了一种无漂移柔性压力传感器,克服了柔性传感器难以实现精确压力计量的普遍性难题,相关论文以“用于无漂移离-电型传感的无蠕变聚电解质弹性体(Creep-free polyelectrolyte elastomer for drift-free iontronic sensing)”为题发表在《自然·材料》(Nature Materials)期刊上,论文链接为:https://doi.org/10.1038/s41563-024-01848-6。同时,《自然·材料》期刊还以Research briefing的形式予以亮点报道。
柔性压力传感器在机器人触觉、虚拟现实以及可穿戴设备等领域有重要的应用潜力。但由于软材料的本征粘弹性导致的蠕变,现有的柔性压力传感器普遍存在显著的信号漂移。特别是在“离-电型”柔性压力传感器中,离子凝胶的漏液现象更是加剧了传感器的信号漂移,十分钟内的信号漂移量普遍达30%以上。因此,“离-电型”柔性压力传感器往往“测得灵敏”,但在静态或准静态压力的精确计量方面“测不准”,在诸多领域不能有效替代传统的硬质传感器。
针对上述挑战,研究团队从材料的分子结构入手,制备了一种无漏液、低蠕变的聚电解质弹性体,有效地抑制了离-电型柔性压力传感器的信号漂移(图)。这种材料由带电的分子链段以及不带电的可滑中性链段共聚形成。带电的分子链把阳离子束缚在分子链上,以网络弹性阻碍离子的向外扩散,能有效防止离子泄露;不带电的可滑中性链可有效降低分子链之间的静电吸引和机械缠结,大幅降低材料的蠕变。在上述分子结构设计的基础上,团队提高了分子链间交联密度,进一步降低了材料的蠕变。
研究结果表明,基于这种聚电解质弹性体的离-电型柔性压力传感器在500 kPa的高压载荷(接近材料的弹性模量)下工作48小时,信号的漂移量低于1%,展现出了优异的抗漂移性能。研究团队将这种无漂移柔性压力传感器集成到机械手上进行目标物的抓取操作,有效解决了传统传感器信号漂移引起的物体滑落或目标物体被抓破等安全性问题。
该研究提供了一种可输出精准压力传感数据的新器件,有望推动机器人触觉和可穿戴设备等领域的发展。
 电话:400-9933-062
电话:400-9933-062 电子邮箱:business@wykt.com
电子邮箱:business@wykt.com

